2024
Preprints
M. Braun, N.Jaquier, L. Rozo, and T. Asfour.
Riemannian Flow Matching Policy for Robot Motion Learning,
arXiv preprint, 2024.
[pdf] [bibtex]
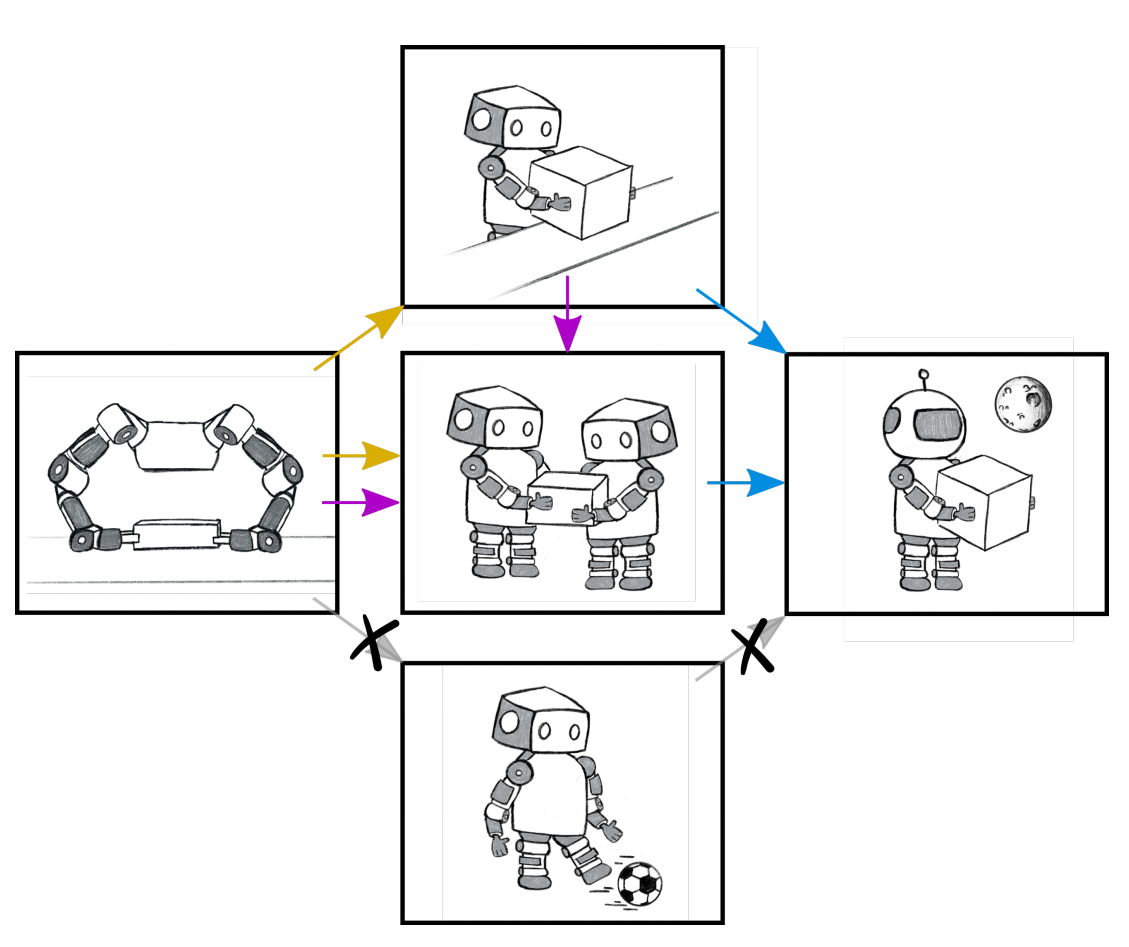
N.Jaquier*, M. Welle*, Andrej Gams, Kunpeng Yao, Bernardo Fichera, Aude Billard, Ales Ude, Tamim Asfour, and Danica Kragic.
Transfer Learning in Robotics: An Upcoming Breakthrough? A Review of Promises and Challenges,
arXiv preprint, 2023.
[pdf] [bibtex]
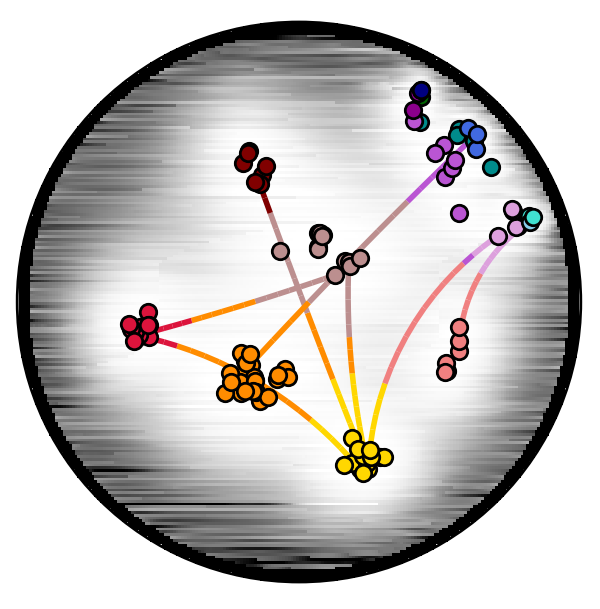
N.Jaquier, L. Rozo, M. Gonzalez-Duque, V. Borovitskiy, and T. Asfour.
Bringing Motion Taxonomies to Continuous Domains via GPLVM on Hyperbolic Manifolds,
arXiv preprint, 2022.
[pdf] [bibtex]
Conference papers
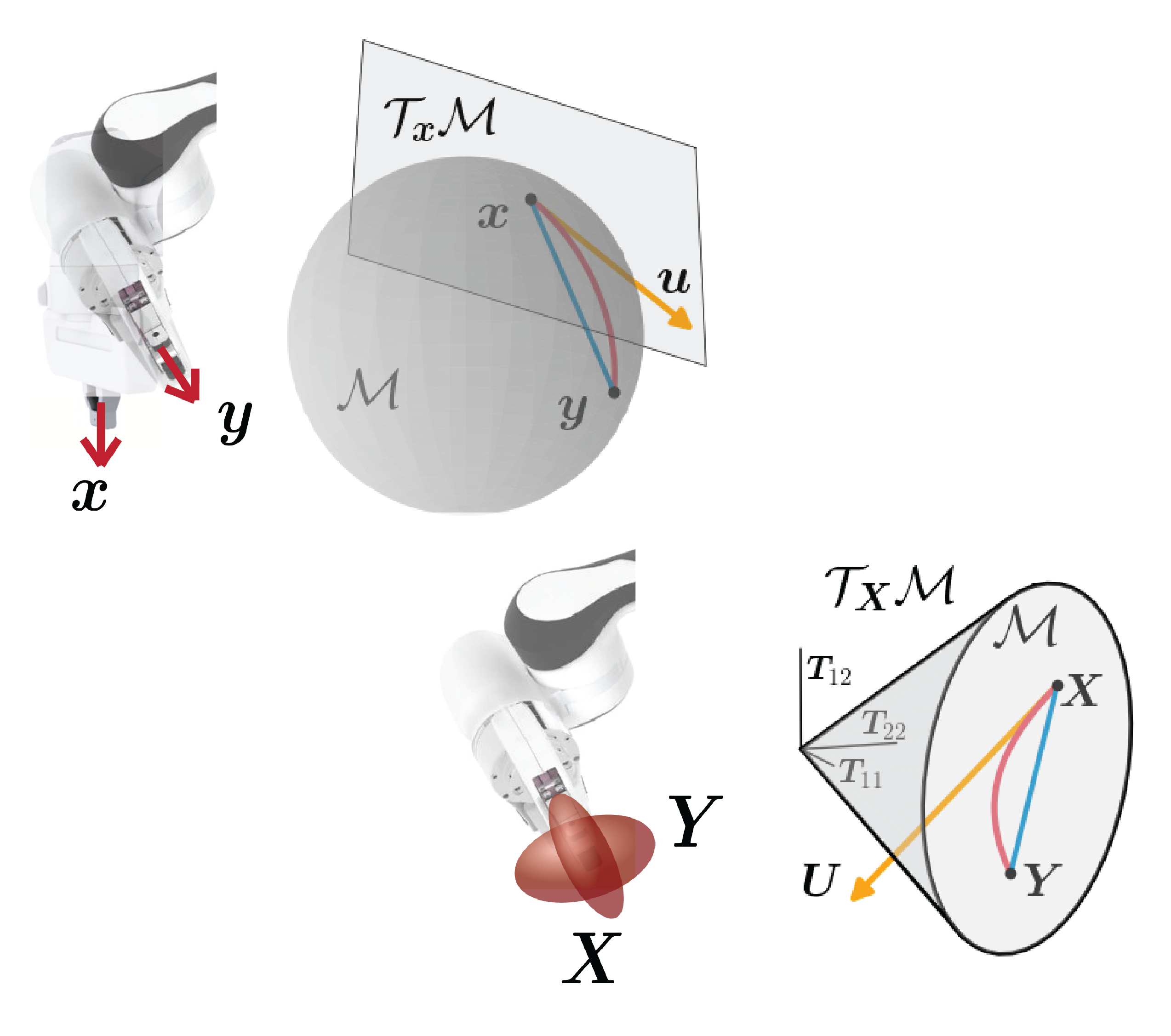
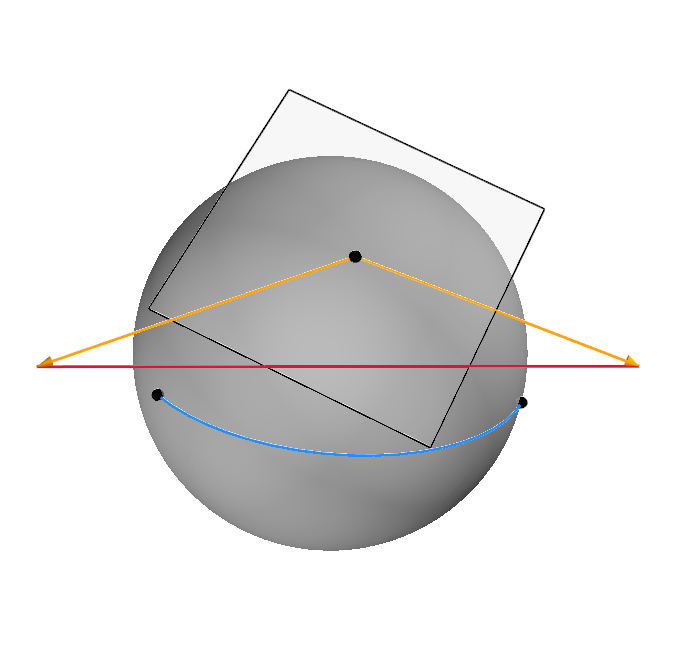
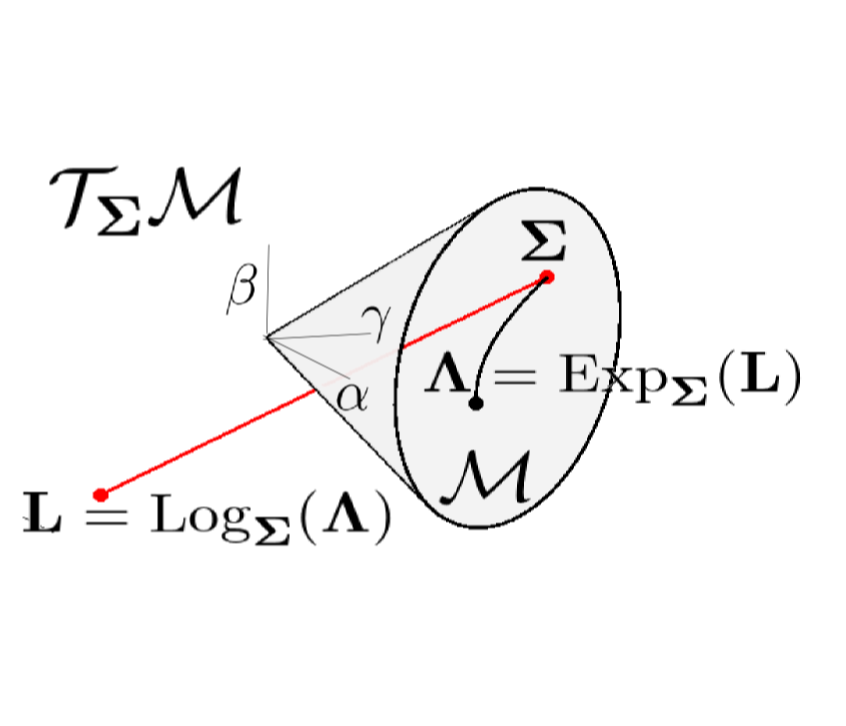
N.Jaquier*, L. Rozo*, and T. Asfour.
Unraveling the Single Tangent Space Fallacy: An Analysis and Clarification for Applying Riemannian Geometry in Robot Learning,
in IEEE Intl. Conf. on Robotics and Automation (ICRA), 2024.
[pdf] [bibtex]
T. Daab, N. Jaquier, C. Dreher, A. Meixner, F. Krebs, and T. Asfour.
Incremental Learning of Full-Pose Via-Point Movement Primitives on Riemannian Manifolds,
in IEEE Intl. Conf. on Robotics and Automation (ICRA), 2024.
[pdf] [bibtex]
J. Gao, X. Jin, F. Krebs, N. Jaquier, and T. Asfour.
Bi-KVIL: Keypoints-based Visual Imitation Learning of Bimanual Manipulation Tasks,
in IEEE Intl. Conf. on Robotics and Automation (ICRA), 2024.
A. Meixner, M. Carl, F. Krebs, N. Jaquier, and T. Asfour.
Towards Unifying Human-Likeness: Evaluating Metrics for Human-Like Motion Retargeting on Bimanual Manipulation Tasks,
in IEEE Intl. Conf. on Robotics and Automation (ICRA), 2024.
Invited talks
26.01
Robotics Institute Seminar Serie, University of Toronto, Canada.
23.02
IEEE RAS TC on Model-Based Optimization for Robotics Seminar Serie, online.
2023
Journal papers
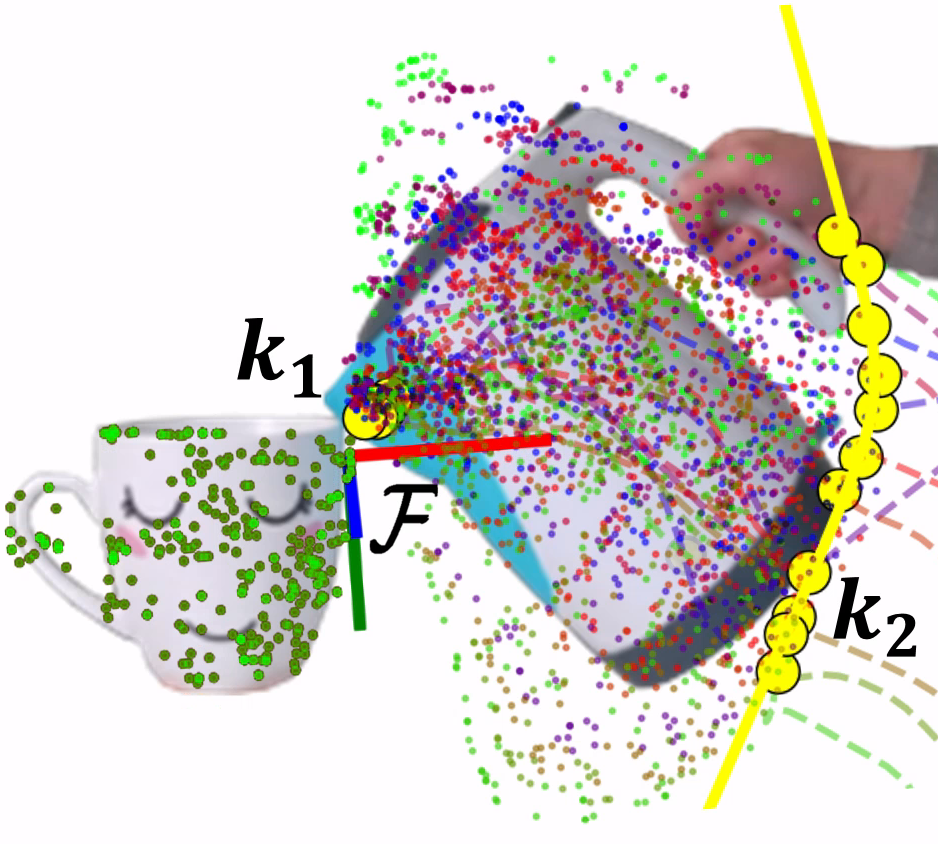
J. Gao, Z. Tao, N.Jaquier, and T. Asfour.
K-VIL: Keypoints-based Visual Imitation Learning,
IEEE Transactions on Robotics, 39(5), pp.3888-3908, 2023.
[pdf] [bibtex] [webpage and video] [code]
Conference papers
A. Meixner, F. Krebs, N.Jaquier, and T. Asfour.
An Evaluation of Action Segmentation Algorithms on Bimanual Manipulation Datasets,
in IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), 2023.
[pdf] [bibtex] [video]
Invited talks
17.03
Robotics, Perception and Learning Lab, KTH, Sweden.
10.05
Ninja Spring School , Bielefeld, Germany.
02.06
Workshop on Geometric Representations: The Roles of Screw Theory, Lie Algebra, and Geometric Algebra, ICRA 2023.
02.06
Workshop on Transferability in Robotics, ICRA 2023.
02.06
2nd Workshop on Compliant Robot Manipulation: Challenges and New Opportunities, ICRA 2023.
14.06
Research Group Differential Geometry, KIT, Germany.
29.08
Gepetto Team, LAAS Toulouse, France.
27.11
AUTOLab, UC Berkeley, USA.
30.11
IPRL Lab, Stanford University, USA.
2022
Journal papers
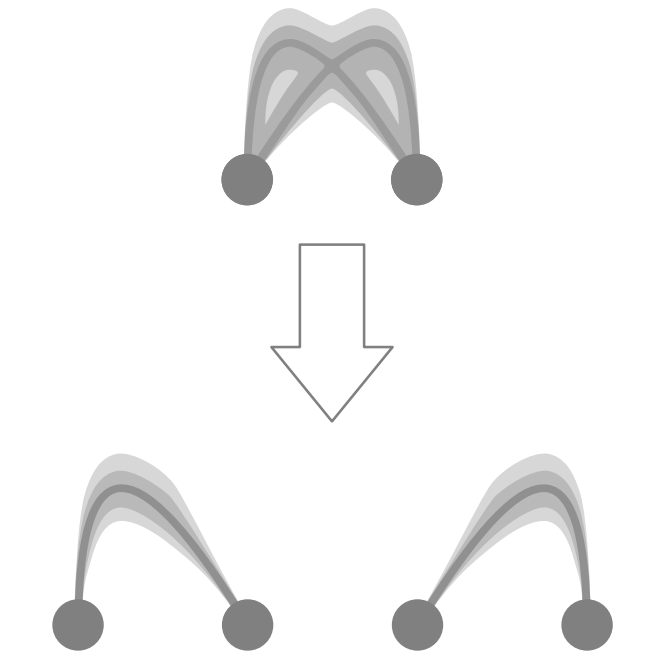
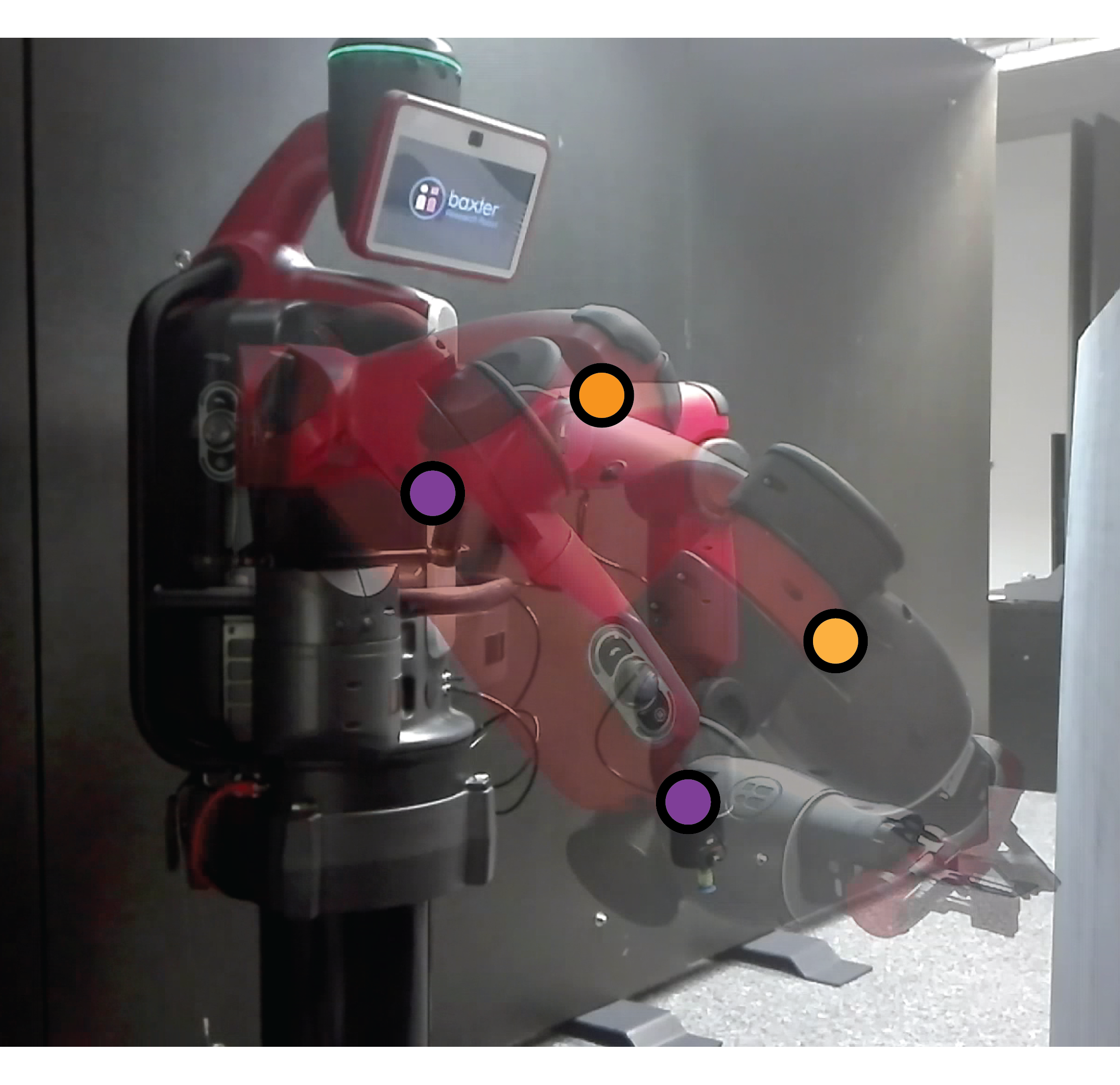
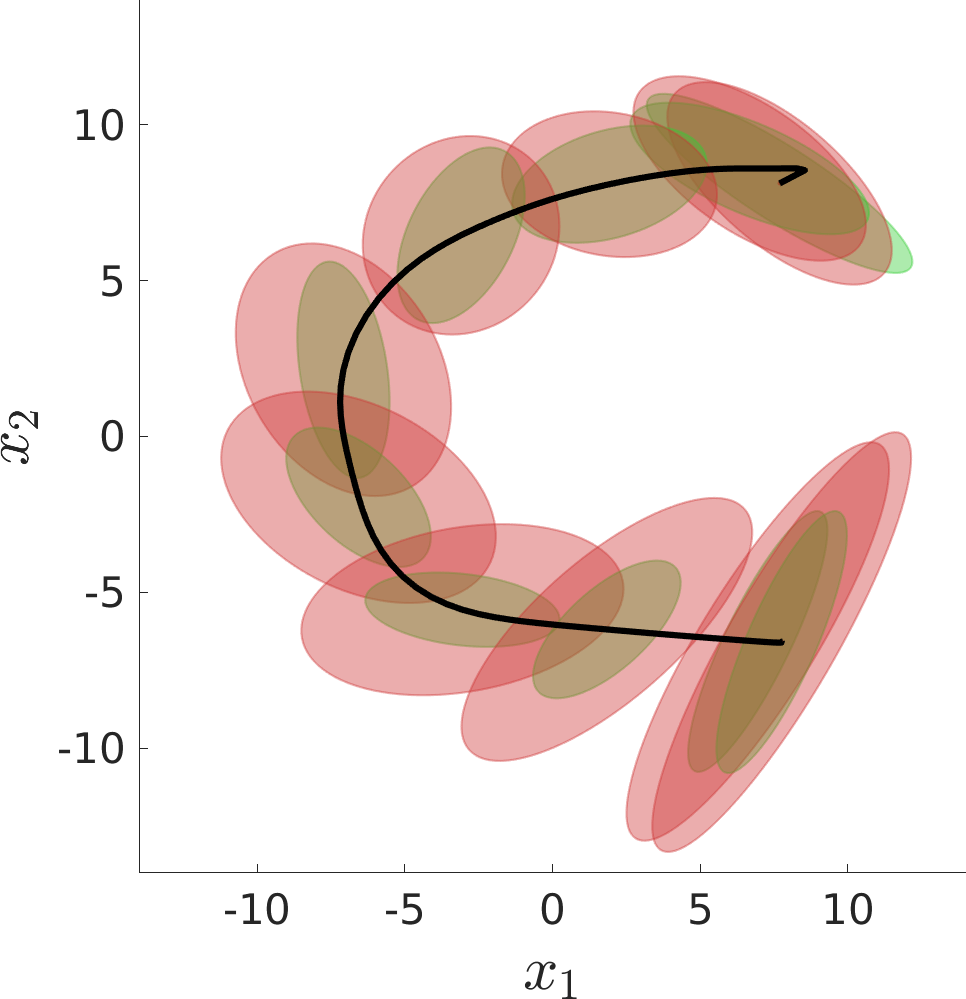
N.Jaquier, Y. Zhou, J. Starke, and T. Asfour.
Learning to Sequence and Blend Robot Skills via Differentiable Optimization,
IEEE Robotics and Automation Letters, 7(3), pp.8431-8438, 2022.
[pdf] [bibtex] [video] [code]
Conference papers
N.Jaquier and T. Asfour.
Riemannian geometry as a unifying theory for robot motion learning and control,
in International Symposium on Robotics Research (ISRR) - Blue sky track, 2022.
[pdf] [bibtex] [video]
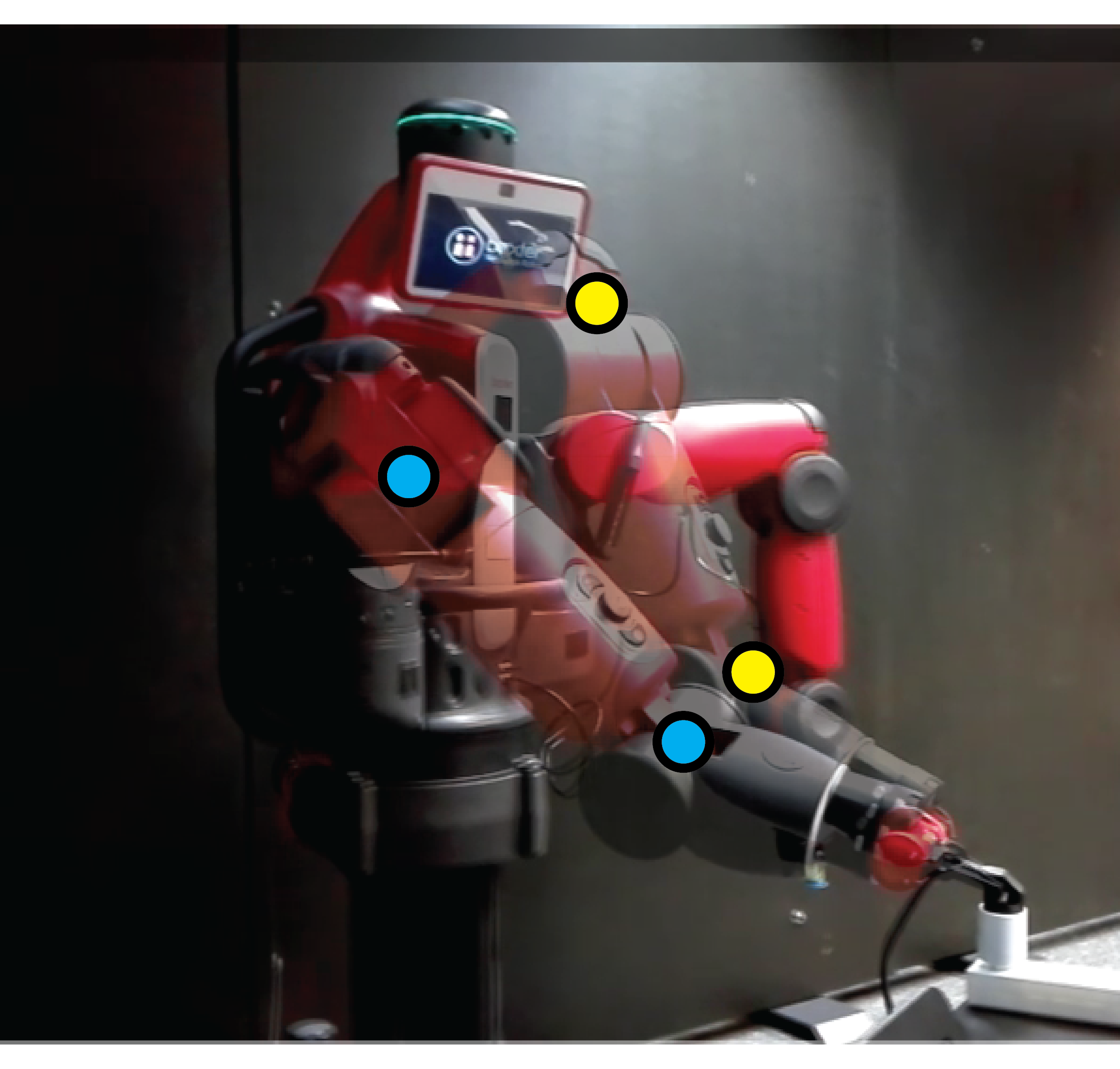
H. Klein, N.Jaquier, A. Meixner, and T. Asfour.
A Riemannian Take on Human Motion Analysis and Retargeting,
in IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), pp.5210-5217, 2022.
[pdf] [bibtex] [webpage and video]
Invited talks
05.10
AI Hub @ Karlsruhe, Germany.
16.11
Learning and Adaptive Systems group , Department of Computer Science, ETH Zurich, Switzerland.
15.12
Geometry, Physics, and Human Knowledge as Inductive Bias in Robot Learning Workshop, Conference on Robot Learning, 2022.
2021
Journal papers
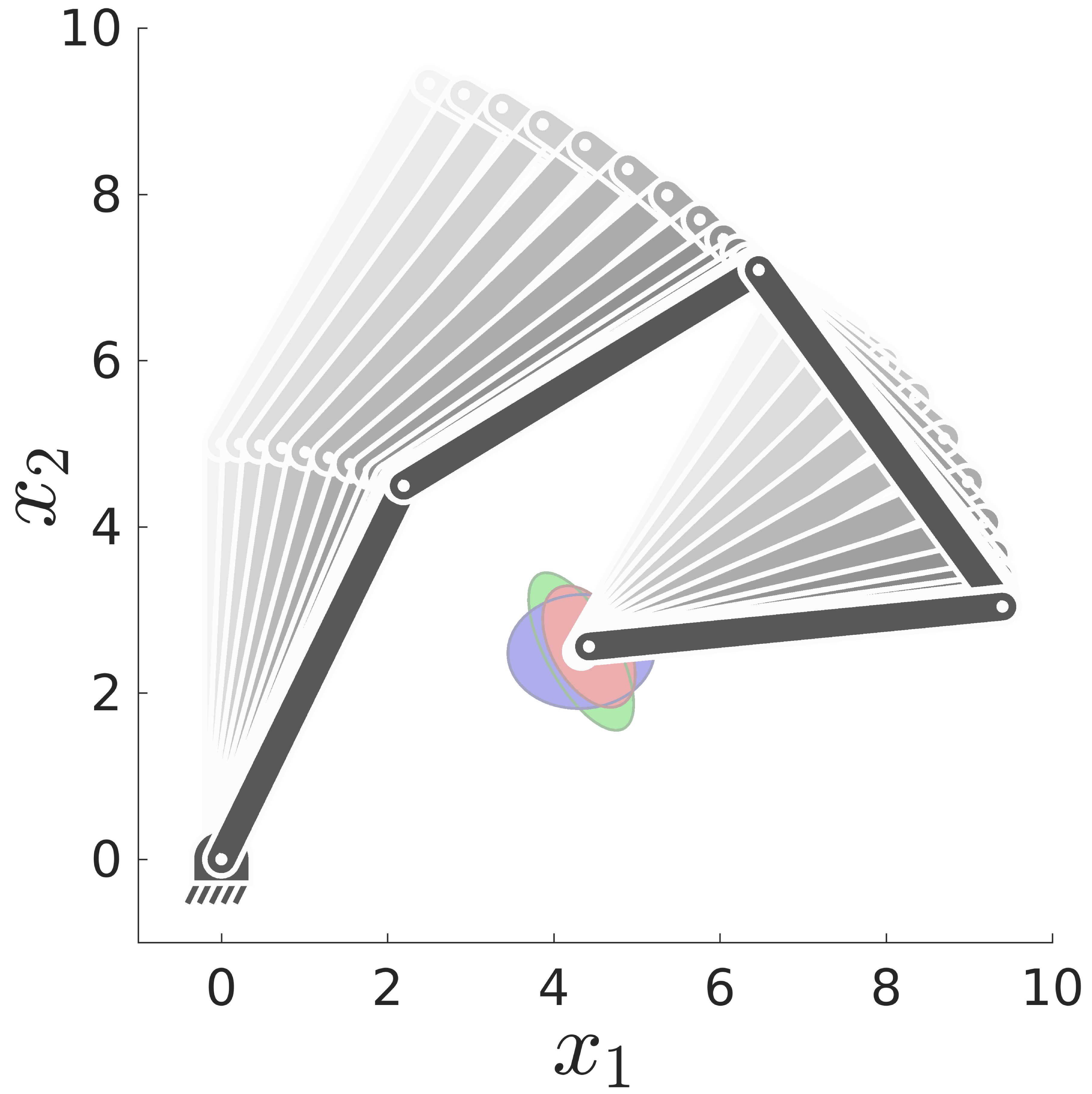
N. Jaquier, L. Rozo, D. G. Caldwell and S. Calinon.
Geometry-aware Manipulability Learning, Tracking and Transfer,
International Journal of Robotics Research (IJRR), 20:2-3, pp.624-650, 2021.
[pdf] [bibtex] [webpage] [code]
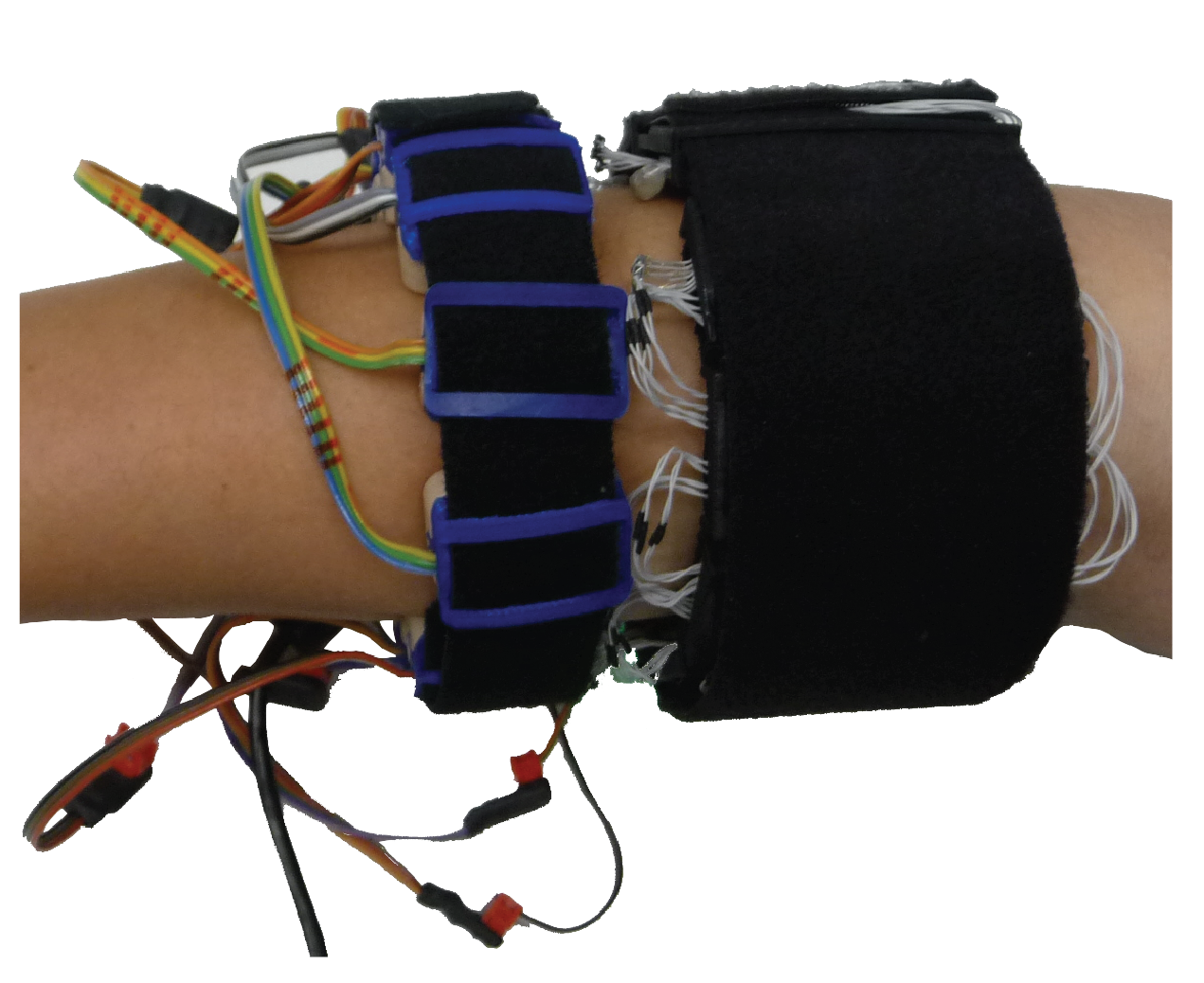
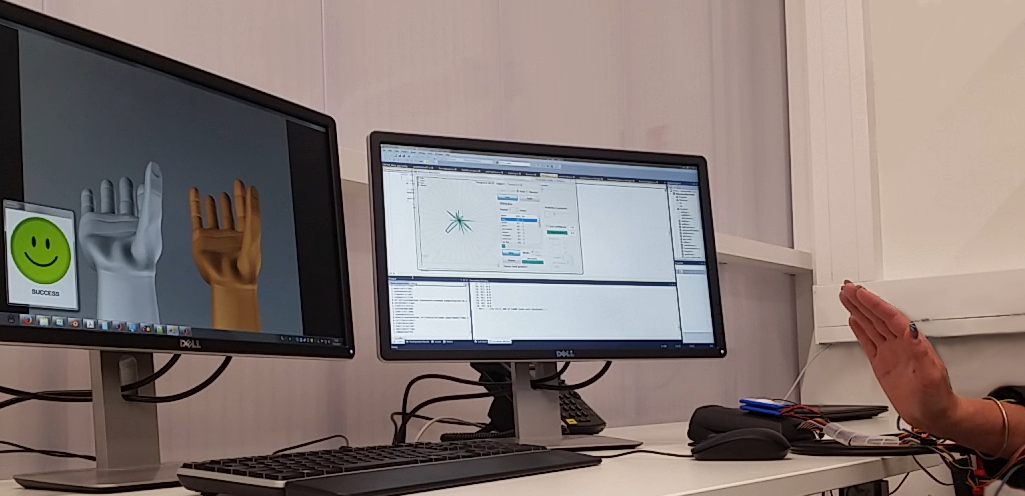
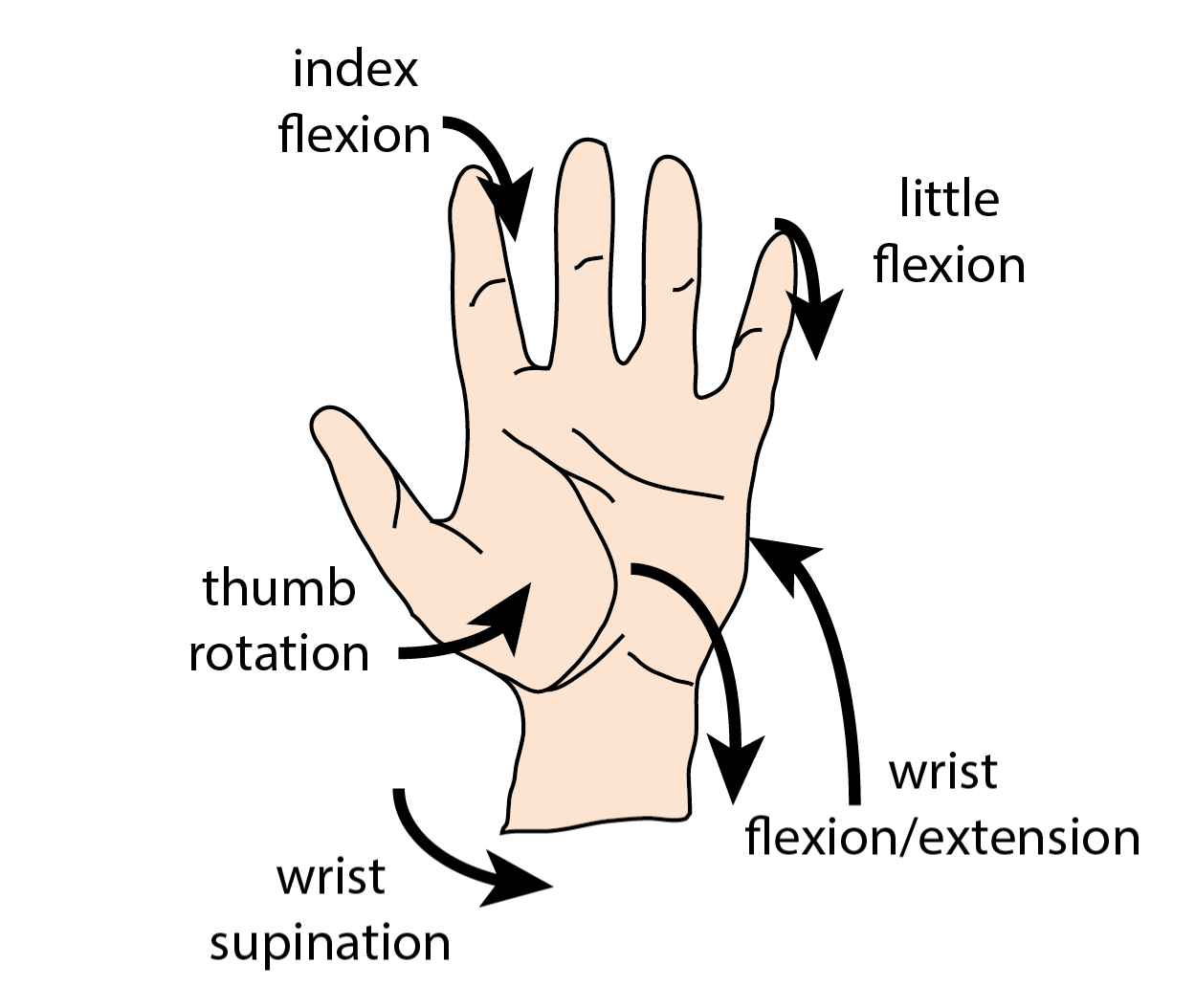
N. Jaquier, R. Haschke and S. Calinon.
Tensor-variate Mixture of Experts for Proportional Myographic Control of a Robotic Hand,
Robotics and Autonomous Systems, 142, 2021.
[pdf] [bibtex] [webpage] [code]
Conference papers
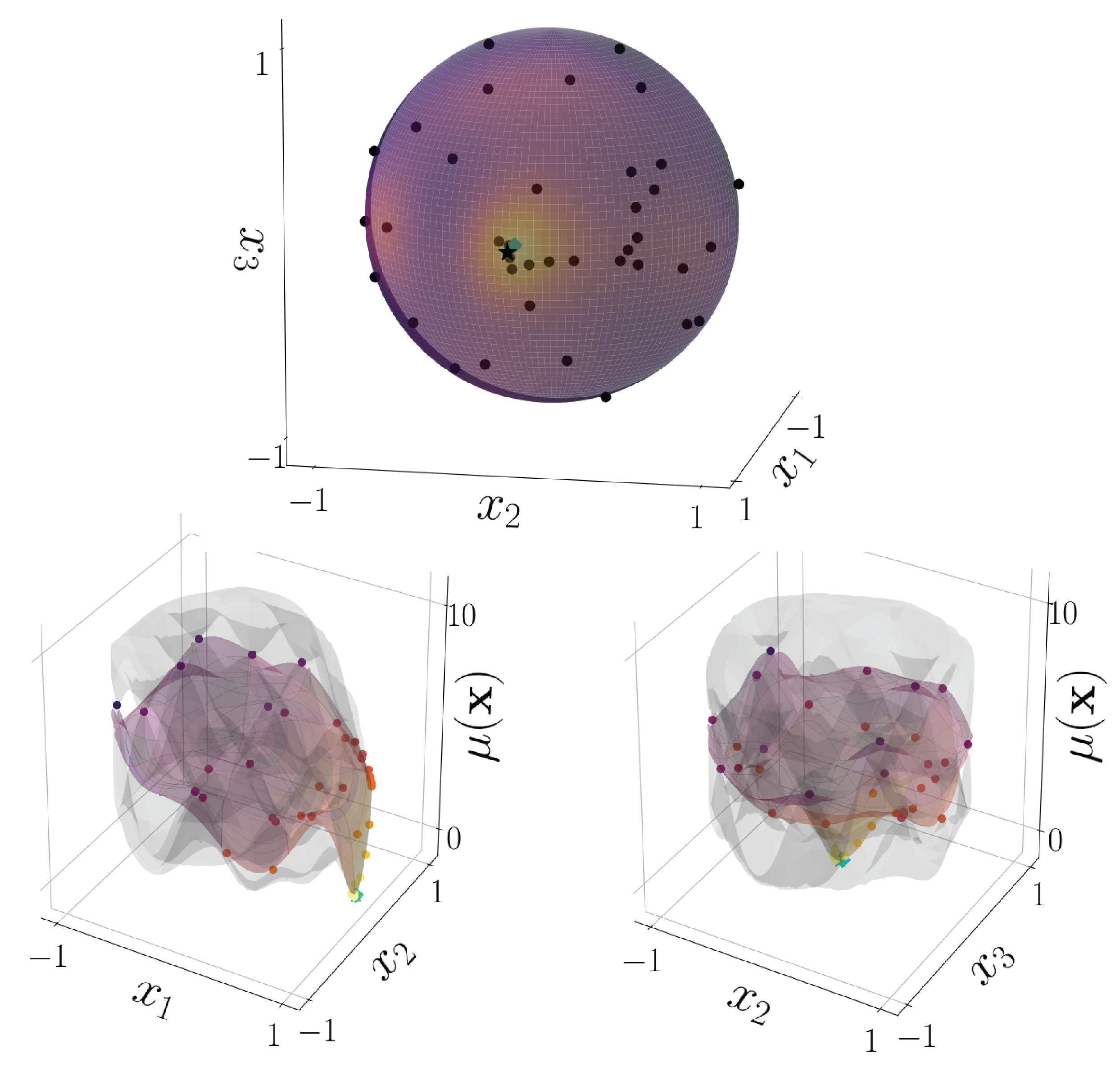
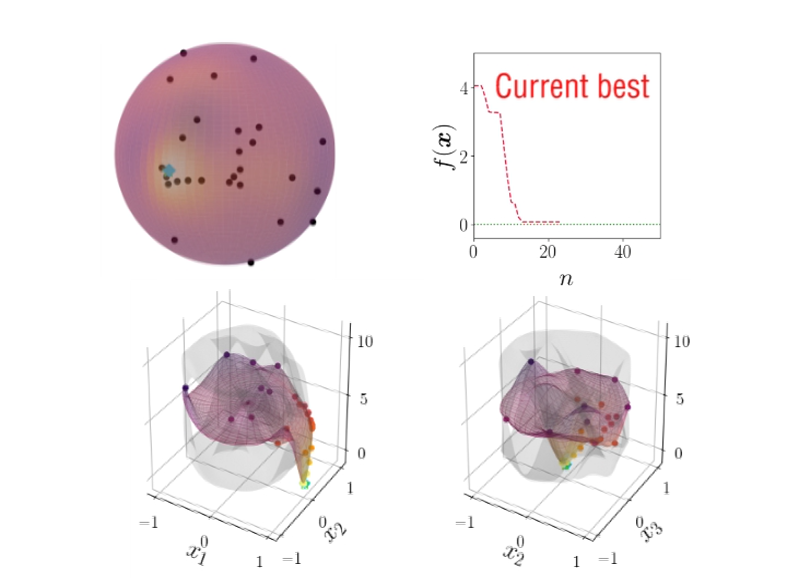
N. Jaquier*, V. Borovitskiy*, A. Smolensky, A. Terenin, T. Asfour, and L. Rozo.
Geometry-aware Bayesian Optimization in Robotics using Riemannian Matérn Kernels,
in Conference on Robot Learning (CoRL), 2021.
[pdf] [bibtex] [code] [video]
Invited talks
25.11
Secondmind, Cambridge, United Kingdom. Talk title: Bayesian optimization on Riemannian manifolds for robot learning.
2020
PhD thesis
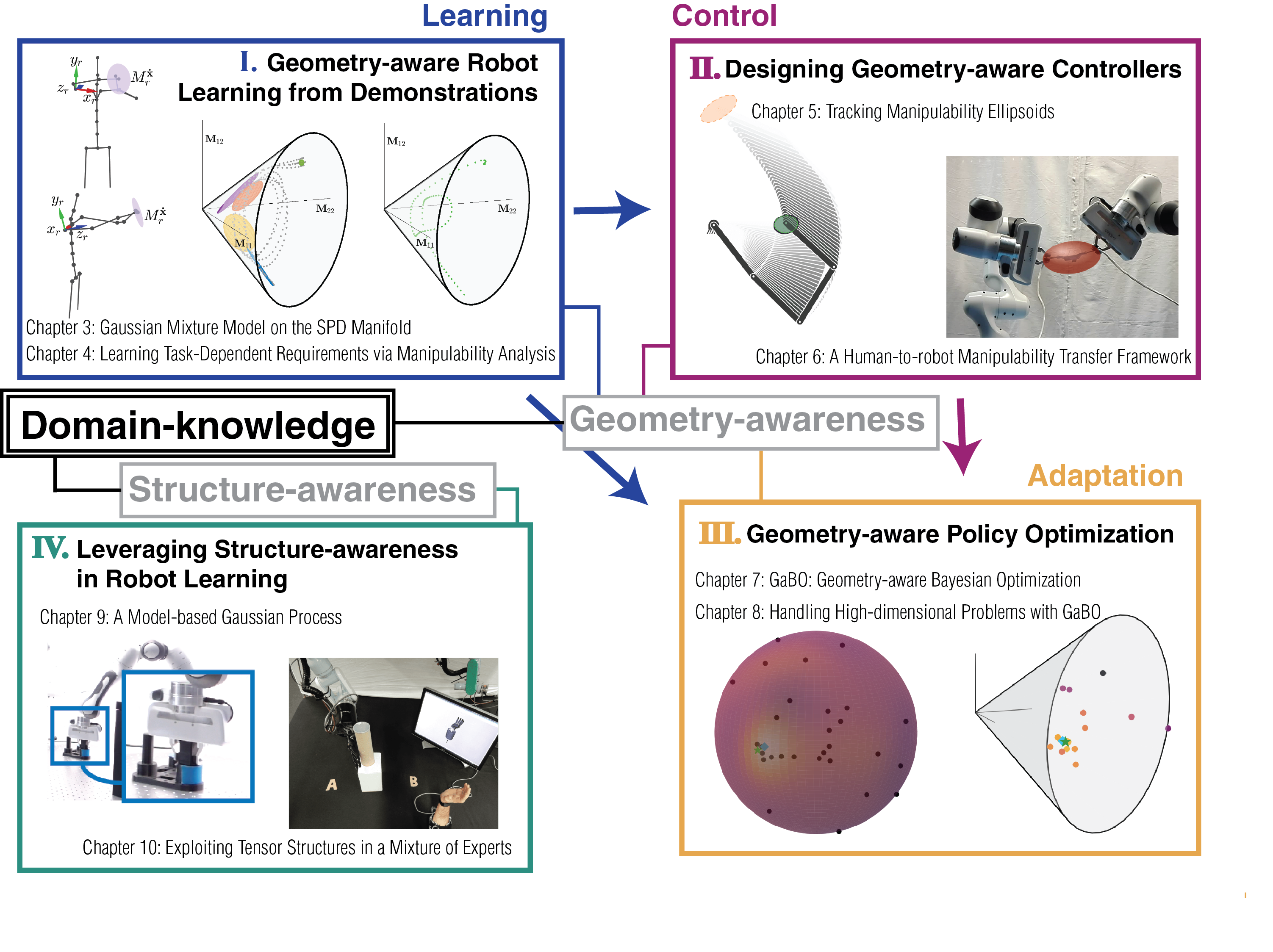
N. Jaquier.
Robot skills learning with Riemannian manifolds: Leveraging geometry-awareness in robot learning, optimization and control,
PhD thesis, Ecole Polytechnique Fédérale de Lausanne (EPFL), 2020.
Nominated for the Asea Brown Boveri Ltd. Award.
[pdf]
Conference papers
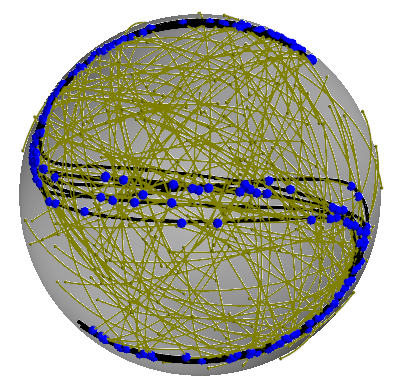
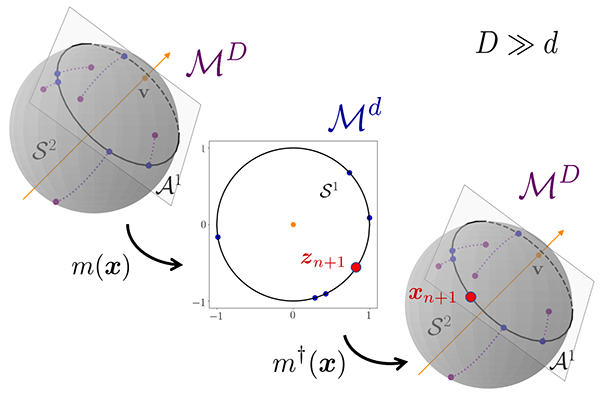
N. Jaquier and L. Rozo.
High-dimensional Bayesian Optimization via Nested Riemannian Manifolds,
in Conference on Neural Information Processing Systems (NeurIPS), 2020.
[pdf] [bibtex] [code]
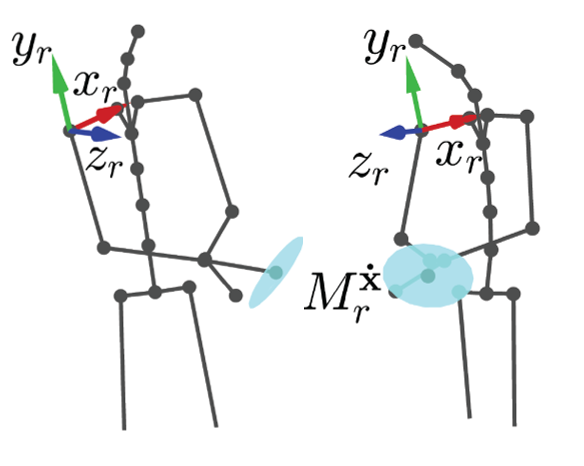
N. Jaquier, L. Rozo and S. Calinon.
Analysis and Transfer of Human Movement Manipulability in Industry-like Activities,
in IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), pp.11131-11138, 2020.
[pdf] [bibtex] [webpage]
H. Girgin, E. Pignat, N. Jaquier and S. Calinon.
Active Improvement of Control Policies with Bayesian Gaussian Mixture Model,
in IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), pp. 5395-5401, 2020.
[pdf] [bibtex]
2019
Conference papers
N. Jaquier, L. Rozo, S. Calinon and M. Bürger.
Bayesian Optimization Meets Riemannian Manifolds in Robot Learning,
In Conference on Robot Learning (CoRL), 2019, (Oral presentation - Best presentation award ).
[pdf] [bibtex] [webpage] [code] [ presentation ]
N. Jaquier, D. Ginsbourger and S. Calinon.
Learning from demonstration with model-based Gaussian process,
In Conference on Robot Learning (CoRL), 2019.
[pdf] [bibtex] [webpage] [code]
Invited talks
13.07
Festival Scientastic, EPFL campus Valais-Wallis, Switzerland
19.05
Minisymposium on Algebraic Geometry for Kinematics and Dynamics in Robotics, SIAM conference on Applied Algebraic Geometry, Bern, Switzerland
2018
Journal papers
N. Jaquier and S. Calinon.
Improving the control of prosthetic hands with tactile sensing,
Micro & Nano Magazine, Micronarc.
[pdf] [bibtex]
Conference papers
N. Jaquier*, L. Rozo*, D. G. Caldwell and S. Calinon.
Geometry-aware Tracking of Manipulability Ellipsoids,
in Robotics: Science and Systems (R:SS), 2018.
[pdf] [bibtex] [webpage] [video] [code]
Workshop papers
N. Jaquier, L. Rozo and S. Calinon.
Geometry-aware Robot Manipulability Transfer,
in Learning and Inference in Robotics:
Integrating Structure, Priors and Models (LAIR) Workshop at Robotics: Science and Systems Conference (R:SS), 2018.
[pdf] [bibtex]
N. Jaquier and S. Calinon.
Geometry-aware Control and Learning in Robotics,
in Robotics: Science and Systems (R:SS) Pioneers Workshop, 2018.
[pdf] [bibtex]
Invited talks
22.11
Valais/Wallis AI Workshop - AI for Rehabilitation and Prosthetics, HES-SO Valais, Switzerland
2017
Journal papers
N. Jaquier, M. Connan, C. Castellini and S. Calinon.
Combining electromyography and tactile myography to improve hand and wrist activity detection in prostheses,
Technologies, 5:4, Special issue on assistive robotics.
[pdf] [bibtex] [code]
Conference papers
N. Jaquier and S. Calinon.
Gaussian mixture regression on symmetric positive definite matrices manifolds: Application to wrist motion estimation with sEMG,
in IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), pp.59-64, 2017.
[pdf] [bibtex]
L. Rozo, N. Jaquier, S. Calinon and D. G. Caldwell.
Learning manipulability ellipsoids for task compatibility in robot manipulation,
in IEEE/RSJ Intl. Conf. on Intelligent Robots and Systems (IROS), pp.3183-3189, 2017.
[pdf] [bibtex] [webpage]
N. Jaquier, C. Castellini and S. Calinon.
Improving hand and wrist activity detection using tactile sensors and tensor regression methods on Riemannian manifolds,
in Myoelectric control (MEC) Symposium, 2017.
[pdf] [bibtex]
Invited talks
28.11
Swiss Machine Learning Day, EPFL, Switzerland
14.11
Applied Mathematics Seminar, Applied Mathematic Dept., UCL, Belgium
24.09
Workshop on Micro-data: the next frontier in robot learning?, IROS 2017, Vancouver, Canada
23.05
Numerical Analysis Seminar. Mathematic Dept., University of Geneva
31.01
Rapid-fire talk. Applied Machine Learning Days, EPFL, Switzerland
20.01
Operating room technicians class, Upper School of the Health (ES Santé), Lausanne, Switzerland